Open Student Thesis Offers
When writing your thesis at TUM I6, please follow our thesis guidelines. A guide to writing good thesis can be found here. A collection of useful material for research can be found here.
Fleet Management, AI Graph Generation, AV and EV simulations

Reach out to us if you are interested in any of the following topics -
- Fleet management
- AI in mobility
- AMoD
- Autonomous and Electric Vehicles
- Digital Privacy in smart cities
Contact - muhammad.sajid.ali@tum.de, freddy.pringle@tum.de, nagacharan.tangirala@tum.de
Deep Learning for Computer Vision


If you are interested in researching trending topics in the field of computer vision and pattern recognition:
- Object detection
- Segmentation
- Tracking
- Surface reconstruction
- Mesh generation
- Text-to-image generation
- Domain adaptation of synthetic data
then please contact: Bare Luka Žagar
Reinforcement Learning, Representation Learning, Meta-RL and Robotics

Three of our DEMOs can be found at https://sites.google.com/view/kuka-environment/ , https://sites.google.com/view/cemrl, and https://videoviewsite.wixsite.com/rlsnake.
- Meta-RL:
- RL:
- [BA/MA] Complex Robotic Manipulation via Actionable Representation Learning Guided Exploration
- [BA/MA] Reinforcement Learning via Hindsight Experience Replay (HER)
- [BA/MA] Reinforcement Learning for Adaptive Locomotion of Snake-like Robot
- [BA/MA] Energy-Efficient Gait Exploration for Snake-like Robots Based on Adversarial Reinforcement Learning
- [MA/GR] Vision-Based Continual Reinforcement Learning for Robotic Manipulation Tasks
- [BA/MA] Imitation Learning via Demonstration
- [BA/MA] Reinforcement Learning via Hindsight Goal Generation (HGG)
We have several other open topics in the domain of reinforcement learning in robotics and we also accept open proposals or ideas with yourselves. For more information, please contact Zhenshan Bing.
Neural SLAM and Biomimetic Rodent Robot
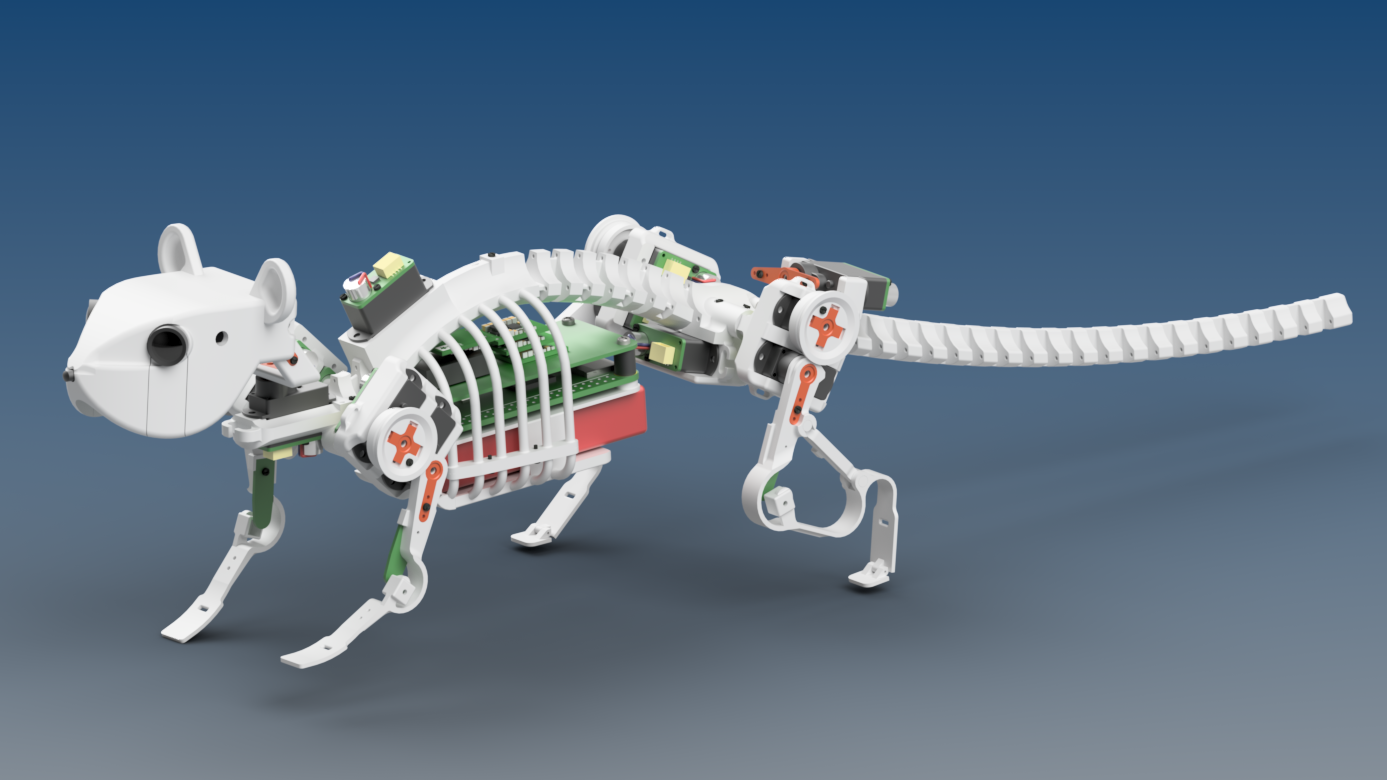
- [MA/BA] Design and Control of a Rat Robot with Actuated Spine and Ribs
- [MA/BA] Biologically Plausible Spatial Navigation (NeuralSLAM)
- [MA/BA] Brain-inspired Localization and Mapping based on LiDAR Sensor
For more information about this topic, please contact Zhenshan Bing and Florian Walter.
Autonomous Vehicles

The Cyber Physical Systems group is pursuing a wide range of research directions related to safe decision making, motion planning and control for autonomous vehicles, involving both formal methods, sampling- and optimization-based methods as well as deep learning-based methods.
Currently, the following thesis proposals are open:
- [MA] Deep Multi-Step Planning for Autonomous Driving
- [MA/GR/SA] Computing Interaction-aware Reachable Sets of Automated Vehicles using Monte Carlo Tree Search
- [MA] Graph-based Prediction of Driver Behavior
- [BA] Deep Traffic Rule Violation Prediction using Abstract Syntax Tree Features
Spiking Neural Networks - Next Generation AI for Autonomous Driving

At the KI-ASIC project we are researching about the application of bio-inspired neural networks to real-world applications.
If you are interested in learning about neuroscience and how neuromorphic engineering is trying to narrow the gap between biology an technology, do not hesitate to contact us.
Formal Methods and Reachability Analysis

- [BA] Edge-Case Simulations for Linear Systems with Uncertain Initial State and Input
- [MA] Ensuring Safety of Large-Scale Structures
- [MA] Exploiting Mixed-Monotonicity in Reachability Analysis
- [MA] Errors of Trajectories for Autonomous Vehicles and Cyber-Physical Systems
- [MA] Model Predictive Control of Autonomous Drones for Power Line Inspection
- [MA] Safety Certification for Learning-Based Control
Autonomous Path Planning in Robotics

Currently open positions:
Additionally, we will have open topics in safe reinforcement learning for manipulators and mobile platforms in the future.
If you are interested in these topics, you can contact: jakob (dot) thumm (at) tum.de
Offline Reinforcement Learning

Modular Robotics

For interest in a BA/MA thesis in machine learning for modular robotics, please contact Jonathan Kuelz or Matthias Mayer.
Currently open:
- [MA/SA/BA] Robotic Path-Planning for Computer-Aided Manufacturing
- [MA/SA/BA] Optimization of Robot Placement
We also offer industrial thesis with the startup RobCo. For the current thesis offered with RobCo please have a look at their website. For general interest in a Bachelors or Masters Thesis with RobCo, please follow this link.
Neurorobotics in the Human Brain Project
- Developmental Body Modeling in Soft Robotics
- Cloud-Based Robotics for Machine Learning
- Virtual Neurorobotics with Intel Loihi
- Spiking Compliant Robot Control with Intel Loihi
- Integration of the Neural Simulator NEST into the Neurorobotics Platform
- Deep Spiking Q-Networks
- Autonomous Locomotion Control for Snake Robot Based on Bio inspired Vision Sensor and Spiking Neural Network
- Advanced Autonomous Driving Control Based on Bio inspired Vision Sensor and Spiking Neural Network
- Spiking Neural Network for Autonomous Navigation based on LiDAR Sensor
- Deep Spiking Reinforcement Learning
- Learning adaptive target reaching with Recurrent Neural Networks
- Biologically-inspired Perception for Autonomous Vehicles based on LiDAR Sensor
Providentia++ - A Testbed for Autonomous Driving

- Real-Time and Robust 3D Object Detection on the Autonomous Driving Test Stretch Using LiDAR Point Cloud Data
- Real-Time and Multi-Modal 3D Object Detection on the Autonomous Driving Test Stretch Using Camera and LiDAR Sensors
- Deep Traffic Scenario Mining, Detection, Classification and Generation on the Autonomous Driving Test Stretch using the CARLA Simulator
- Real-Time Camera-Only 3D Object Detection for Autonomous Driving
- Sensor Fusion and Vehicle Tracking for Intelligent Transportation Systems
- Adaptive Data Distribution Services, V2X Communication Protocols, Channel Quality Prediction and Optimal Resource Allocation
- Automated Camera Stabilization and Calibration for Intelligent Transportation Systems
- Real-Time Object Detection in Poor-Visibility-Scenes Using Multi-Sensor-System
Machine Learning Algorithms for Hybrid Vehicle Data
Please see this page for the available topics about 3D Object Detection and Tracking.
Project SunRISE: Anomaly Detection in Time-Sensitive Networks
Autonomous Robot & Visual Servo & Deep Learning & Robot Design & Medical Robotics
For more information, please visit my homepage Mingchuan Zhou or contact me via email (zhoum@in.tum.de).
Data Analysis and Deep Learning in Robot-Based Additive Manufacturing
BA / IDP / MA - partly in cooperation with Siemens AG
For more information, please visit my homepage Raven Reisch or contact me via email (raven.reisch@tum.de).
OSBORNE (Future Automotive E/E Architectures for Autonomous Cars)
We have a set of open topics in the domain of affective computing and multimodal emotion recognition, within the context of OSBORNE project, for more information please contact Sina.
HORSE / REMODEL
We have several open topics related to computer vision in the HORSE and REMODEL projects. Please contact Arne for more details.
Machine Learning, Robustness and Safety
TBD, please contact Thomas Brunner.
Collaboration with Chair for Product Development and Lightweight Design
External thesis proposals
- Masterthesis – Grey-Box Modellierung und Validierung des Motoraufheizverhaltens auf dem Rollenprüfstand und im Fahrzeug mittels Machine Learning
- [MA] Behavior Planning for Autonomous Driving by Combining Neural Networks and Tree Search (ZF Friedrichshafen AG)
- [MA] Hybrid Parallel Online POMDP Decision Making for Lane Changes in Urban Areas (ZF Friedrichshafen AG)
- [MA] Sim2real robotic grasping of unknown objects with multi-fingered hand (Agile Robots AG)